
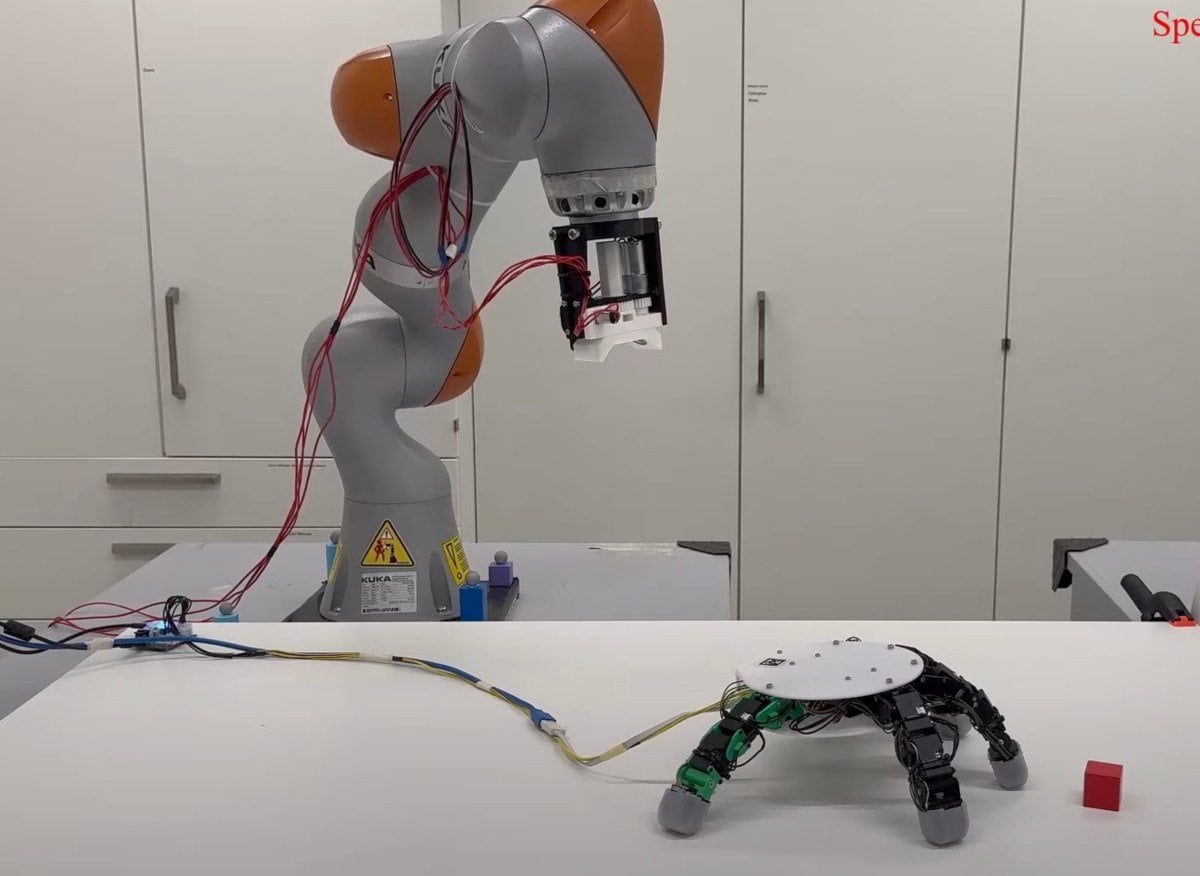
Die Roboterhand kann sich vom Arm lösen, zu Gegenständen kriechen und diese aufheben
Robot hand can detach from arm, crawl over to objects, and pick them up
Die Roboterhand kann sich vom Arm lösen, zu Gegenständen kriechen und diese aufheben
Robot hand can detach from arm, crawl over to objects, and pick them up
1 Comment
The researchers employed a genetic algorithm and simulation to test a bunch of different configurations in order to optimize for the ability to hold things and to move.
The whole system is controlled manually in the video, but lead author Xiao Gao tells us that they already have an autonomous version (with external localization) working in the lab. In fact, they’ve managed to run an entire grasping sequence autonomously, with the Handcrawler detaching from the arm, crawling to a location the arm can’t reach, picking up an object, and then returning and reattaching itself to the arm again.
“Although you see it in scary movies,” researcher Xiao Gao cheekily [told IEEE](https://spectrum.ieee.org/epfl-lasa), “I think we’re the first to introduce this idea to robotics.”